只要运动精度至关重要,编码器就很常见。事实上,很难说有哪个行业没有受益于编码器技术。它无处不在,从最坚固环境中的关键任务应用到要求严格重复性的日常工作应用。
从根本上讲,编码器将旋转或线性运动转换为数字信号,用于监控或控制速度、方向、距离或位置。US Digital 提供超过一百万种高质量的现成编码器配置,主要分为绝对编码和增量编码两种类型。绝对编码器在单一360度轴旋转内报告精确的轴角。相比之下,增量编码器提供相对于主位置或零位置的相对位置。美国数字编码器设计可能根据所需的精度和环境严酷性使用光学或磁性传感器。
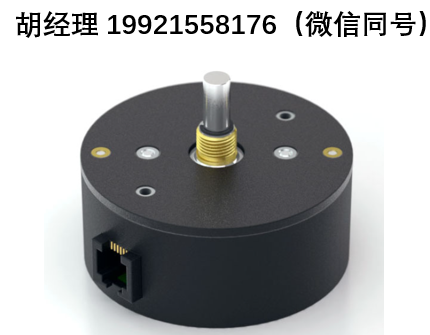
A2 绝对式光学轴角编码器
A2 特点
- 可选择轴套衬套或滚珠轴承版本
- 12 位分辨率,分辨率可现场编程,每转范围为 2~4096 个编码(出厂默认 3600 个)
- 完整 360° 测量范围,7 毫秒更新时间
- 低功耗设计:最大工作电流 18.5 毫安,睡眠模式下仅 2.5 毫安
- 支持现场可编程参数,例如设置零位(下方可下载演示软件)
- 内置 EEPROM,可存储下载的参数配置
- 默认波特率 9600 波特,最高可调节至 115K 波特
- 可选 12 位模拟电压输出(出厂默认 0~+3.599 伏,可现场编程扩展至 0~+4.095 伏)
- 多圈模式(注意:必须持续供电,防止归零)
- 工作温度范围:-25℃至 70℃
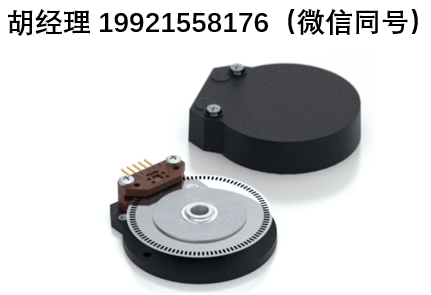
A2 光学编码器是一款 12 位绝对式旋转编码器,可报告单圈 360° 旋转内的轴角。与增量式(有时也称为相对式)编码器不同,A2 可提供真实的(绝对)轴位置,无需在电源重启后执行回零或归零周期。
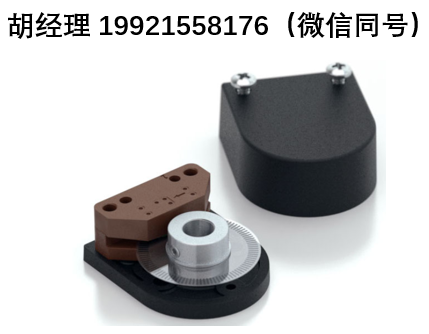
三种轴扭矩选项:
- 默认型 (-S):带高阻尼的轴套衬套,适用于人机交互场景。
- 滚珠轴承型 (-B):微型精密滚珠轴承,适合高速应用。
- 轻静态阻尼型 (-N):带低阻尼的轴套衬套,适用于低速场景。
A2 通过 RS 485 制式串行总线 通信,采用 US Digital 的 SEI(串行编码器接口)协议,可在单一网络中简单、快速、便捷地组网多个 SEI 设备。PLC、运动控制器和计算机也可通过 US Digital 的 SEI 转 USB 接口设备接入 SEI 总线。如需了解 SEI 总线的完整信息,请参阅《SEI 绝对编码器通信协议》网页。
A2 还提供 可选模拟量输出。模拟量输出选项的最大电压范围为 0~4.095 V,分辨率为 12 位。输出电压可通过简单的 SEI 命令进行缩放,以实现用户自定义电压范围。出厂时,模拟量输出电压默认设置为 0~3.599 VDC。请注意:若选用 A2 模拟量输出选项,一条 SEI 总线上仅可连接一台设备。
| 参数 | 价值 | 单位 |
|---|---|---|
| 工作温度 | -25到70 | C |
| 振动(5Hz至2kHz) | 20 | G |
| 静电放电,IEC 61000-4-2 | ± 4 | kV |
| 参数 | 套筒衬套 | 滚珠轴承 |
|---|---|---|
| 最大加速度 | 100000 辐射值/秒² | 100000 辐射值/秒² |
| 最大轴速 (机械) | 100转 | 10000转 |
| 典型轴扭矩 | 0.5 in-oz (S-option) 0.3 in-oz (N-option) | 0.05 in-oz (B-option) |
| 最大轴载荷 | 2磅动态 | 2磅。 |
| 承载生命 | > 1000000转 | L10= (90/Fr)³ * 其中L10= 以数百万转计的生命,且 Fr= 径向轴载荷(磅) |
| 重量 | 2.9盎司。 | 2.9盎司。 |
| 最大轴径 | 0.0015英寸,T.I.R. | 0.0015英寸,T.I.R. |
| 安装板螺丝扭矩 | 4-6英寸磅 | 4-6英寸磅 |
| 最大面板螺母紧固扭矩 | 20磅 | 无 |
电气规格
- 规范适用于整个工作温度范围。
- 典型值为Vcc = 12V和25C。
| 参数 | 敏。 | 类型。 | 马克斯。 | 单位 |
|---|---|---|---|---|
| 电源电压 | 7.5 | 12 | 16 | V |
| 供电电流 @ 12V 供电 主动 休眠 | 14 2.5 | 18.5 | mA | |
| 模拟输出阻抗 | 51 | 欧姆 | ||
| 零刻度模拟电压 | 0 | 2 | 12 | mV |
| 全量程模拟电压 | 4.066 | 4.095 | 4.124 | V |
| 输出噪声(模拟版本) | 10 | mV rms | ||
| 微分非线性(模拟版本) | -1.0 | 1.0 | LSB | |
| 积分非线性(模拟版本) | -1.0 | 1.0 | LSB | |
| 绝对准确(SEI接口版本) | 0.18 | 0.25 | 学位 | |
| 角度跟踪速度 单转模式 多转弯模式 | 3600 1800 | 转速 | ||
| 职位更新率(1) | 7 | 硕士。 |
(1)内部微控制器每7毫秒对磁盘进行快照,并将位置存储在内存中。它会立即响应“报告位置请求”,发送最近计算的位置。