RIFTEK,ISD-3,ISD-5,速度和距离传感器,非接触式测量移动表面和物体的速度和长度
这些传感器用于非接触式测量移动表面和物体的速度和长度,例如金属丝、带材、管子、纤维、薄膜、纸张、热钢和车辆。
该系列包括两种型号:
ISD-3 — 基于物体图像的光栅空间滤波;
ISD-5 — 基于激光多普勒干涉仪
型号:
ISD-5
- 激光多普勒振动仪
- 工业应用于冶金、电缆生产、纺织面料

ISD-3
- 物体图像的栅格空间过滤
- 任何表面的可靠测量
- 汽车和铁路应用

规格:
光学速度和长度传感器ISD-3系列规格
| 因素 | 值 | 备注 |
| 参数 | 值 | 注释 |
| 速度范围 | 0.2-250公里/小时 | TTLout为400Hz/m/s。其他要求 |
| 速度精度* | <±0,15 % RMS | 在试验台(跑步机)上以18,38 km/h的速度测定 |
| 绝对距离精度* | <±0,1 % RMS | 在S >100米处校准后 |
| 测量频率 | 34.5赫兹或47.5赫兹 | 用户可调,(最大80赫兹,参见第10.3节。详情见下文) |
| 到道路的标称距离和公差(工作距离范围) | 35 15厘米或50 20厘米** | 应要求提供其他服务 |
| 系统电源(公差) | 12V标称电压(11-14.5伏)*** | |
| 系统功耗 | 传感器头:20重量 处理器单元:1.5重量 | |
| 传感器头工作温度范围 | -20…+50˚С | |
| 传感器+安装支架的重量 | 280克+120克 | 没有电缆 |
| 处理器单元的重量 | 350克 | |
| 传感器尺寸 | 55×205毫米+照明器 | 见图2 |
| 处理器单元尺寸 | 120×100×35毫米 | 不带连接器 |
| 传感器电缆长度 | 5米 | 根据要求最多10米 |
| 系统电源电缆长度 | 2米 | 根据要求最多10米 |
| 环境传感器头部保护 | IP67 | |
| 磁性固定工具 | 4块磁铁x 16公斤强度 | 选项,见图2 |
| 控制器单元输出: | ||
| 模拟输出频率输出数字输出 | 速度,最大40毫伏/(米/秒)3V。长度,400脉冲/米(=速度400赫兹/(米/秒),弯曲0-3伏,TTL兼容,最高200千赫。以太网(UDP协议): 测量数量、速度、长度、 | 典型值,用户可调整(见下面的软件描述)。DAC和频率分辨率——12位其它要求 |
| 物理数据延迟 测量频率时,毫秒 34.5赫兹 47.5赫兹 | 15 | 稳定=测量时间,不求平均值。 |
| 基础软件 | —通过以太网读取数据、可视化和保存数据的程序; —传感器诊断程序 —读取数据示例(LabView 8.2.1及更高版本) —通过以太网读取数据的动态库(DLL) —通过任何互联网浏览器配置传感器参数 | 详见下文。可以根据要求定制软件。 |
*校准后放在物体上,以消除安装轴线误差。
**对于典型路面。在平坦且无对比度的表面上,实际上限可能更小。
***仅受照明灯限制,因为它直接由电源供电。处理器单元和传感器电子设备有一个单独的+5V线性稳压器,公差高达35 V。
激光速度和长度传感器ISD-5系列规格
| 参数 | ISD-5 标准 | ISD-5 微型 | 备注 |
| 速度范围,米/秒 | 0,02 — 20 | 0,005 — 5 | 典型值。标称工作距离越小,最小和最大速度范围越小。 |
| 速度精度*,% RMS | 0,07 0,02 | 0,15 0,05 | 无信号平均 平均时间为0.2-0.3秒, 速度大于1米/秒时 |
| 长度精度*,% RMS | <±0,05 | <±0,1 | |
| 测量频率,赫兹 | 16 — 54 | ||
| 到物体的标称距离(公差),сm | 10, 20, 30, 50, 75, 100) | 10,15, 20 | 可在订购时注明 |
| 距离公差 | 标称值的20-25% | 取决于表面(在信号减弱的范围边缘) | |
| 发射器类型 | 可见光或红外可见光激光器,5-120毫瓦 | 可见光c.v .激光器,< 5 mW | 3B级— 3R |
| 电源,V | 12 (8 — 14 ) | 传感器和控制器单元中的内部线性稳压器+5V。 | |
| 功耗,重量: 传感器 控制器单元 | 0,5 — 2 | 0,5 | |
1 | |||
| 温度工作范围 | +15…+50 | -10…+50 —带主动热稳定(可选):50..+80 \uс,带保护空气冷却外壳(可选)。 | |
| 传感器重量,g | 320 | 70 | |
| 传感器尺寸,毫米 | 85×79×46 | 58×43×30 | 不带连接器、混合孔和固定孔(见下图) |
| 从传感器到控制器单元的电缆长度,v | 1、8或3 | 使用带DB9连接器的标准电缆RS-232或VGA。要延长长度,可以按顺序连接电缆。 | |
| 传感器环境保护 | IP67 | ||
| 控制器单元: | |||
| 重量,克 尺寸,毫米 | 350 | ||
| 模拟输出频率输出数字输出 | 速度,最大150毫伏/(米/秒)3V。长度,2000脉冲/米(=速度2000赫兹/(米/秒),弯曲0-3伏,TTL兼容,最高200千赫。以太网(UDP协议) | 典型值,用户可调整(见下面的软件描述)。ADC和频率分辨率——12位其他要求 | |
| 物理数据延迟 测量频率时,毫秒 54赫兹 16赫兹 | 9 | 稳定=测量时间,不求平均值。 | |
| 基础软件 | —通过以太网读取数据、可视化和保存数据的程序; —传感器诊断程序 —读取数据示例(LabView 8.2.1及更高版本) —通过以太网读取数据的动态库(DLL) —通过任何互联网浏览器配置传感器参数 | 详见下文。可以根据要求定制软件。 | |
*剔除传感器安装的几何误差所需的预校准。
原理:
非接触式速度测量原理非常简单。最原始的“工具”就是人的眼睛。每个人都可以通过快速扫视铁路车厢或汽车窗户来评估物体的运动速度。大脑会处理这个信号,评估到某个物体的距离以及其角速度,或仅仅依赖生活经验。传感器用于评估相同的参数,但精度更高。
首先,让我们考虑激光传感器,因为它的设计更简单。为了实现这一点,需要一个移动的物体,一个光源(否则什么都看不见),以及一个由透镜和光电探测器组成的光学系统,用于注册反射信号。物体表面在颜色和光泽上是不均匀的,因此,当物体移动时,光电探测器将注册与速度成正比的信号频率。该频率的典型值由光电探测器的注册区域的线性大小和物体穿过该区域所需的时间来定义。因此,问题似乎已经解决,但精度仍有待提高。光学系统注册了所谓的低频信号。为了提高测量精度,需要缩小由移动物体生成的频率谱。这可以通过空间滤波器来实现(这一术语与光栅光学传感器相关)。虽然激光传感器用于创建条纹(干涉)图案,即物体在激光光束(检测区域)内的周期性调制。由于激光辐射的相干性,所有光子在光束中是相位一致的,初始光束需要分成两束,并通过角度重新合并。这样会形成一个空间滤波器。
现在,任何物体轮廓或颜色的变化通过该结构滤波器时,会生成一个反射信号,其强度以以下频率调制:照明周期 – 穿越速度。信号的频谱随着生成的周期数而变窄(周期越多,频谱越窄)。单一的轮廓或颜色变化将不仅生成一个脉冲,而是多个脉冲(脉冲组),脉冲的数量由条纹图案的周期数决定。例如,实际上,如果光束直径为5毫米,而条纹周期为0.05毫米,则会生成100个光束,并相应地产生脉冲组。考虑到频谱比上述低频信号缩小了约100倍,这个信号现在就不再连续,而是中断的,称为伪信号。值得注意的是,通常20到30个光束就足以达到0.1%或更高的测量精度。
在光学传感器中,物体通过均匀光源(灯泡或LED)照射,并且传感器内部有周期性纹理(图案)。这为图案提供了额外的保护(例如滑雪橇与雪车的对比),但也带来了许多问题,包括频率响应(注册信号频率与物体速度之间的比例因子,以Hz/m(m/s)表示)与物体距离的依赖性。提前说明,这个问题已经得到了有效解决。
激光和光学速度传感器的详细分析(空间滤波器生成方法、信号处理方法等)可以在专著中找到。理论部分包含了约200页的内容。然而,目前尚无实际指南用于制造能够在真实恶劣条件下(如温差较大、表面种类不同或测量过程中距离变化)工作的传感器。
全球有少数几家实际生产非接触式传感器的制造商。大约有10家激光传感器制造商和不到10家光学传感器制造商。本文将介绍这两种类型的传感器。
传感器设计的主要特点。激光传感器采用基于波前分束原理的原始光学单体结构。它提供了一个稳定的条纹图案,具有抗温差的能力,并且在物体的较远距离下,光束的传播差异为零,确保在广泛的距离范围内最大光束偏移。此外,无需调整光学块。传感器接收图案系统的光学图示完全消除了测量速度与物体距离的依赖性,从而保持了较高的光学照射功率。
最新的微电路和微控制器与信号处理器被用于硬件信号处理,使接收模拟电子产品能够进行高频率精确的速度测量,并实现各种输出模拟、频率和数字信号。制造了一系列适用于工业应用的传感器,标准物体距离从15到130厘米,测量速度范围从0.01到100 m/s,适用于车辆(详见ISD-3和ISD-5的详细说明)。
需要注意的是,这两种传感器根据测量的速度(速度积分时间)来测量里程(实际上需要的长度)。也就是说,能够获得的测量精度(即传感器在测量频率方面的能力)已经达到了其实用极限,实际上已经超出了所需需求。因此,技术数据中规定了长度测量精度小于0.1%。然而,这个参数依赖于长度本身,并且能够独立检查这种精度(正如下面给出的例子所示,但实际测量可以更精确)。因此,主要的重点应该放在测量的可靠性上,即设备应能在不同条件和表面类型下正常工作。
另外,关于在标准工业任务下的距离测量,提供以下几点说明。假设有一个长的移动物体(金属带、玻璃板、布料等),它需要被切割成特定长度的部分。当达到该长度时,传感器应向执行器发出信号。假设有一个数字输出(以太网、USB),可用于当前测量长度的读取。例如,在测量频率为50 Hz且物体速度为1 m/s的情况下,当前长度增量为(1 m/s)/(0.02秒)= 2厘米。但是,这可能不足够。然而,有一个长度脉冲输出,其比率为1000 Hz每1 m/s或每米1000个脉冲。这个输出频率每秒更新50次,即无论速度如何,测量的距离增量将为1毫米。显然,这个参数可以设置为每米10000个脉冲,换句话说,这些传感器的长度测量精度被认为是完美的,最终的精度仅受切割工具规格的限制。
下面是一些传感器应用的例子,带有精度评估和测量频率。
ISD-5激光传感器在道路上的应用测试。
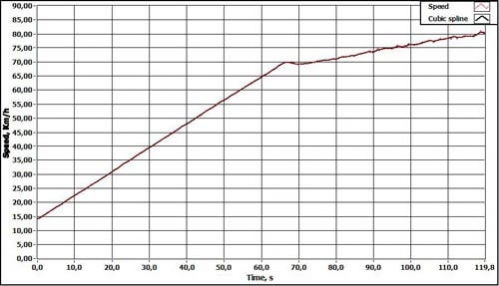
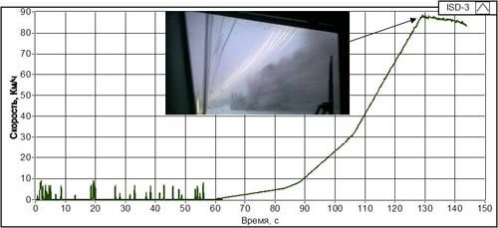
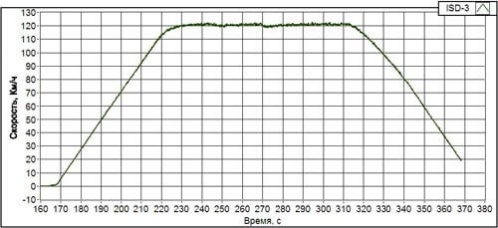
传感器安装的近似高度为50厘米(允许的限度为35到65厘米)。测量频率为54.2 Hz,速度测量范围为0.02–110 km/h。安装传感器的车辆在一条1公里长的赛道上行驶(在城市道路上,晴天,环境温度为-7°C)。车辆的速度变化(0–50 km/h),并有几次停车。测量结果根据三圈的长度定义——1055.740米、1056.244米和1055.33米,即考虑到路线不完全重复,测量频率低于0.05%。

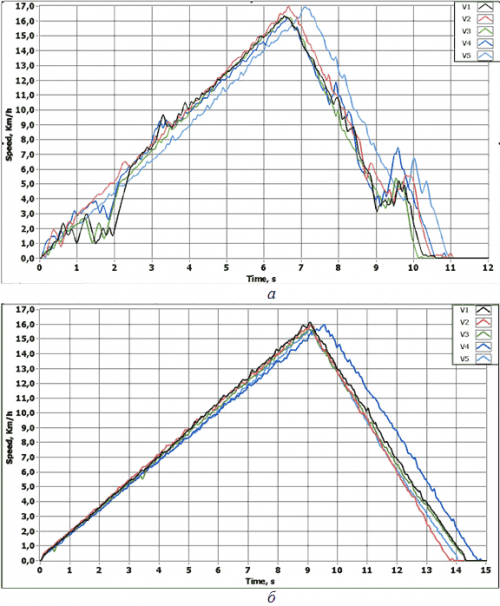
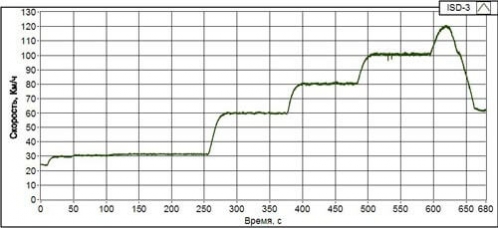
两个传感器,光学传感器和激光传感器一起使用。它们如图1所示安装在一辆车辆上。ISD-3传感器的安装名义高度为离地面50厘米,而ISD-5激光传感器的安装名义高度为130厘米,但实际安装高度为100厘米。在一段平直的沥青路面上进行四圈测试(每个方向各两圈),测试路段长度大致相等。测试完成后,评估了两个传感器的相对测量差异。结果见表1。
表1. 光学传感器ISD-3和激光传感器ISD-5在同一路段的平行测量结果
ISD-5.
| Lap No. | ISD-316, m (measurement 23.6 Hz) | ISD-505, m (measurement 40.6Hz) | Relative difference (V3/V5-1)*100 |
| 1 | 1345.68 | 1345.01 | -0.05 |
| 2 | 1394.01 | 1395.08 | 0.07 |
| 3 | 1382.51 | 1382.73 | 0.016 |
| 4 | 1345.14 | 1343.06 | -0.15 |
| Average relative difference | 0.03±0.1% | ||











 暴风雪以恒定的速度行驶着。
暴风雪以恒定的速度行驶着。






RIFTEK,ISD-3,ISD-5,速度和距离传感器,非接触式测量移动表面和物体的速度和长度
https://www.bihec.com/riftek/ISD-3,ISD-5/