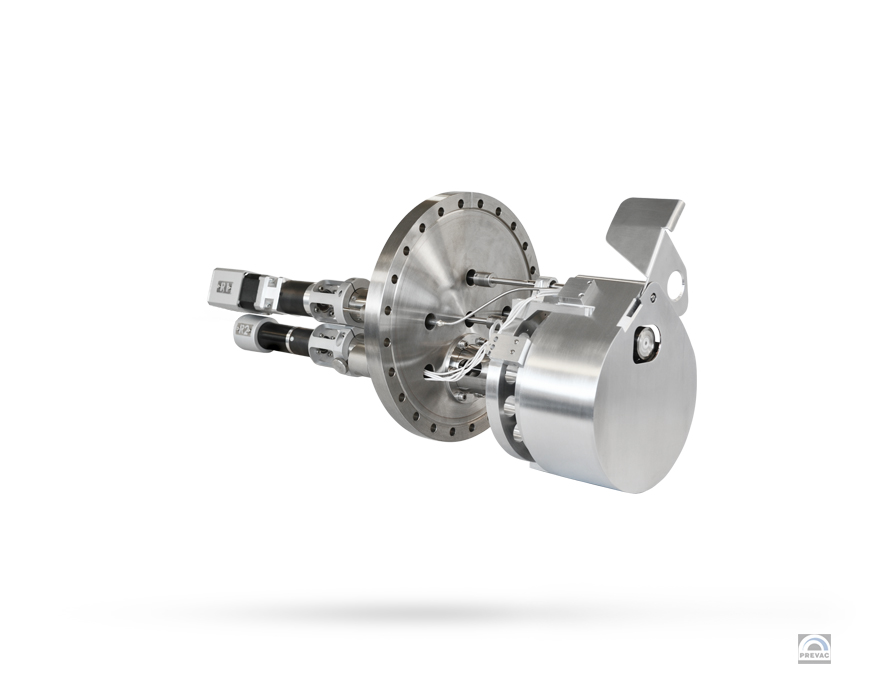
2-5 轴 PLD 目标机械手
2-5 轴电动 PLD 目标机械手专为超高真空条件下的脉冲激光沉积应用而设计。
它是一种高精度、高刚性的 UHV 试样机械手,带有多达 6 个靶架的旋转机构。机械手可以在垂直或水平方向工作,具体取决于 PLD 工艺几何形状
描述
目标纵器有两个旋转轴:R1 和 R2。通过更改 R1 的位置,可以选择不同的目标。R2 轴绕其自身的轴连续旋转。机械手有一个额外的孔/位置(在两个目标之间)以容纳激光功率计。XY 运动模块允许通过激光束扫描目标物。一个轴是电动的 – 用于扫描,第二个是手动的 – 用于调整。附加的 Z 轴用于设置通过负载锁定室传输目标物的传输位置。Z 机芯可以是电动的或手动的。计算机控制靶材旋转和在整个靶材直径(固定激光束)上的径向扫描,以最大限度地利用靶材进行多层沉积。
▪ 靶材支架: PTS
▪ 基本压力: 10-10mbar
▪ 可以固定形状不规则的目标
▪ 目标尺寸:1 英寸或 2 英寸,标准目标厚度:0.5 – 10 毫米
▪ 目标的连续单独旋转
▪ 目标的选择
▪和顺序变化 防止目标
▪的相互污染 径向扫描,自动控制
▪ 靶材同轴安装(相对于基材)并定位,以消除液滴、簇落在基材上的可能性以及可能的目标剥离的影响靶
▪材支架可转移到负载锁定室(或储存室)以快速更换
▪ 水冷系统
技术数据
| 标准底座法兰 | DN 100CF 或 DN 200CF |
| 极限压力范围 | 10-10毫巴 |
| 快门 | 集成, 气动 |
| 冷却方式 | H20 |
| R2 范围 | 360° 连续 |
| 位置控制 | 机动* |
| 分辨率(电动) | 0.1° |
| Z 范围 | 50 mm (可根据要求提供其他) |
| 位置控制 | 手轮 |
| 分辨率(手动/电动) | 500 μm / 标准 10 μm(可根据要求提供 1 μm) |
| XY 范围(可选) | ± 12.5 毫米 |
| 位置控制 | 千分尺/电动* |
| 分辨率(手动/电动) | 5 微米 / 1 微米 |
| 最大速度 | 高达 50 rpm(可根据要求提供其他) |
| 烘烤温度 | 最高 150 °C |
* 步进电机或伺服电机 – 取决于应用。
机械手可以根据要求为客户的电机或驱动器准备。


