澳大利亚 Piezodrive, 压电驱动器,PDu150CL ,低噪声150伏压电驱动单元,带应变计反馈,具有短路、平均电流过载和过高温度的保护
PDu150CL – 低噪声150伏压电驱动单元,带应变计反馈
PDu150CL将高压电源、精密应变调节电路、反馈控制器和超低噪声放大器(26uV RMS)集成在一张信用卡大小的封装中。它提供所有必要的功能,用于高分辨率的开环或闭环控制压电执行器,无论是否集成集成电阻应变传感器。PDu150CL在最高80 kHz频率下输出最高300mA的电流,噪声极低。它适用于半导体机械、扫描探针显微镜、光学、振动控制和纳米定位等要求高的应用。PDu150CL可作为校准对购买,配备SCL系列闭环堆栈执行器。
PDu150CL具有短路、平均电流过载和过高温度的保护。低功耗应用可选择被动冷却,或在功率耗散超过5瓦时使用集成风扇。PDu150CL 可以用四颗 M2.5 螺丝安装,也可以直接安装到主机主板(PDu150CL-PCB)。
| 电源 | +24 V(+/-10%) |
| 输出电压 | -30伏到+150伏 |
| 峰值电流 | 300毫安 |
| RMS Current号 | 235毫安 |
| 功率带宽 | 80 kHz(150 Vp-p) |
| 信号带宽 | 180 kHz |
| 转向率 | 38 V/us |
| 增益 | 20 V/V |
| 输入阻抗 | 10 kΩ(闭环模式) |
| 输入阻抗 | 3.05 kΩ(开环模式) |
| 输入偏移 | +/- 5 mV |
| 负载 | 无限 |
| 输出噪声 | 26 uV RMS(1 uF负载,0.03 Hz 至 1 MHz) |
| 保护 | 短路、过电流与温度 |
| 静流 | 100 mA(关机时 10 mA) |
| 连接器 | 螺丝端子(AWG 20-30) |
| 尺寸 | 89 x 40 x 44 毫米(长 x 宽 x 高) |
| 环境 | 0°C到60°C(32°F到140°F) |
| 重量 | 80克 |
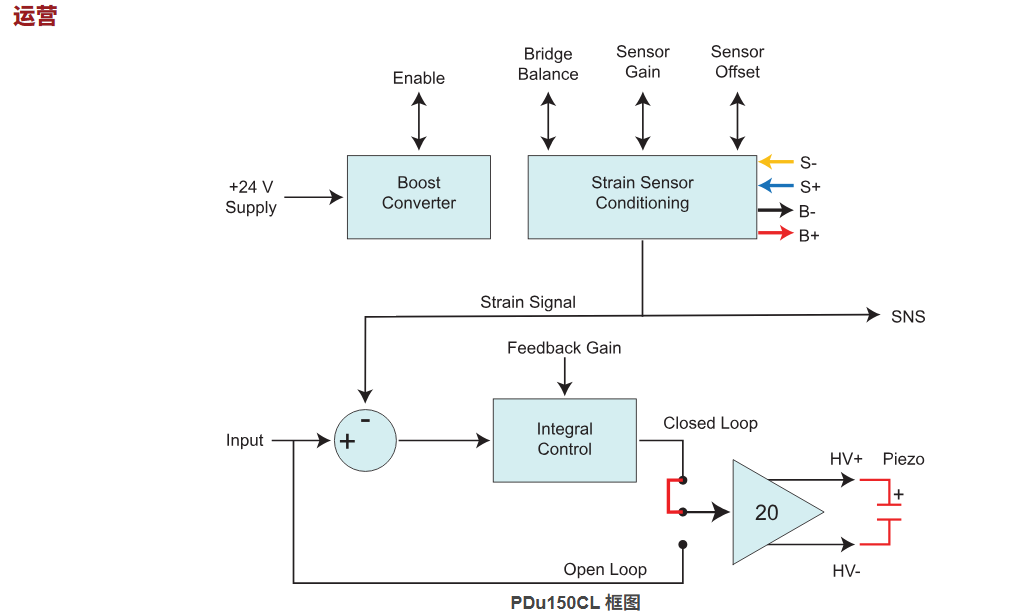
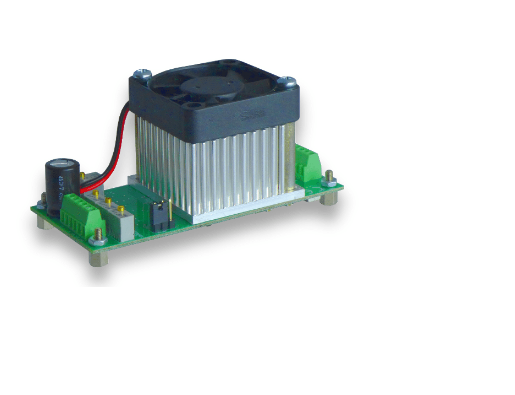
PDu150CL可采用开环或闭环模式。在开环模式下,输入信号直接连接到功率放大器。请注意,放大器输出采用一种新型低噪声差分架构,无法接地,例如接地示波器的地线。
在闭环模式下,输入信号作为反馈回路的指令信号。应变信号来源于连接在压电或结构上的电阻应变计。
输出电流
峰值输出电流为300mA。此外,每个放大器的最大平均电流为105mA。平均电流对于计算功率耗散和平均供电电流非常有用。对于正弦波,平均正输出电流等于=√2π=1π.
供电电流
放大器的静止功率约为2瓦或85毫安。通过将使使能引脚带开集电极电路降至低电平,可将此电压降至<10 mA。如果使用风扇,静止功率增加0.5瓦,
=200×(+0.010)24其中是总平均输出电流。最大供电电流为满功率时0.9A。
功率带宽
功率带宽是可以在无失真的情况下重现的最大频率周期性信号。计算器确定给定负载电容下的最大工作频率和所需功率。计算器包含了电流限制、斜率、输出阻抗和信号带宽的影响。计算器不包含峰值电流限制的时间常数,当功率带宽低于100 Hz时可能不准确。
PDu150CL的标称转速为38 V/us。因此,最大频率正弦波为=38×106π (−)因此,150 Vp-p 正弦波的最大频率为 80 kHz。
在电容负载下,功率带宽受输出电流限制。最大频率的正弦波为=π(−) 其中是峰值电流极限,(−)是峰对峰输出电压,且是有效负载电容。
小信号带宽

小信号频率响应
| 负载电容 | 带宽 |
| 无负载 | 180 kHz |
| 30 nF | 120 kHz |
| 100 nF | 34 kHz |
| 300 nF | 11 kHz |
| 1 uF | 3.2 kHz |
| 3 uF | 980 Hz |
| 10 uF | 190 Hz |
| 30 uF | 73 Hz |
小信号带宽(-3dB)
功率放大器噪声
输出噪声包含一个低频分量(0.03 Hz到 10 Hz),与负载电容无关;以及一个与负载电容成反比的高频分量(10 Hz 到 1 MHz)。最佳噪声性能通过被动冷却实现,因为风扇产生的磁场会在输出端感应 mV 级干扰。在低噪声应用中,风扇被拆除时,如果功率耗散超过5瓦,则需要一定的外部气流,参见散热。
噪声通过SR560低噪声放大器(增益=1000)、示波器和安捷伦34461A电压表测量。低频噪声如下图所示。有效值为15 uV,峰值电压为100 uV。

低频噪声范围从0.03 Hz到10 Hz。
高频噪声(10 Hz到1 MHz)与负载电容的关系列于下表。0.03 Hz到 1 MHz 之间的总噪声可以通过将 RMS 值平方求和得到,即σ=√σ2+σ2.
| 负载 电容 | 高频 噪声均方根值 | 总噪声 均方根值 |
| 10 nF | 450 uV | 450 uV |
| 30 nF | 170 uV | 171 uV |
| 100 nF | 60 uV | 62 uV |
| 300 nF | 34 uV | 37 uV |
| 1 uF | 21 uV | 26 uV |
| 3 uF | 16 uV | 23 uV |
| 10 uF | 16 uV | 22 uV |
| 30 uF | 18 uV | 23 uV |
高频噪声(10 Hz 至 1 MHz)和
总噪声(0.03 Hz 至 1 MHz)
应变传感器规格
| 应变传感器规格 | |
| 桥激励 | 6V(差速) |
| 传感器电阻 | 350欧姆到1000欧姆 |
| 传感器配置 | 单桥、半桥或全桥 |
| 桥梁平衡系列 | +/-6 mV |
| 增益范围 | 200到3000 |
| 偏移范围 | +/-6 mV |
| 带宽 | 10 kHz |
| 输入噪声电压 | 3 uV RMS(0.1 Hz 到 100 Hz |
传感器连接
PDu150CL兼容单元件应变传感器、半桥和全桥传感器配置。以下描述了这些不同布置的优点及推荐的连接方法。包括 www.omega.com 在内的许多供应商都提供合适的应变传感器。PDu150CL可作为校准对购买,配备SCL系列闭环堆栈执行器。
单元应变计
单元件应变传感器在温度稳定或注重简洁的应用中非常有用。如下所示,推荐配置需要三个与应变计电阻等值的假电阻(R)。当假电阻与应变计温度系数相同且热连接于应变计时,温度稳定性最佳。

半桥应变传感器
半桥结构配90度花形传感器,能对温度变化有良好抗拒力,分辨率比单元件高约30%。推荐配置需要两个等于应变计电阻值的假电阻(R)。

与压电展开对齐的应变元件记为(+ε)而90度元素记为(−ε).由于压电器中出现正应变,这一惯例被采纳+ε由于泊松比,导致90度元件发生负电阻变化().
由两个90度花纹传感器组成的全桥结构,对温度变化有良好抗拒力,线性度最佳,分辨率是半桥的两倍;但这种配置也需要更多的布线。PDu150CL可作为校准对购买,配备SCL系列闭环堆栈执行器。


与压电展开对齐的应变元件记为(+ε)而90度元素记为(−ε).由于压电器中出现正应变,这一惯例被采纳+ε由于泊松比,导致90度元件发生负电阻变化().
传感器噪声与分辨率
由于传感器噪声被控制环的互补灵敏度函数滤波,关注的带宽通常为0.1Hz到100Hz。上频限制影响不大,因为该带宽中的大部分噪声来自板载参考和主增益级的低频噪声。桥阻为350欧姆,输入参考噪声总电压如下图,均方根值为3uV,峰间电压为20uV。

350欧姆桥(0.1Hz到100Hz)的总应变噪声
传感器噪声可以用来估算传感器分辨率。两变元件全桥的感应电压为[1, 2]
=12 ε (1+)其中是激励电压(5V),GF是规范因子(通常为~2),ε是应变,且是泊松比(PZT5H为0.34)。在0.1%的全量量度应变下,预期桥电压为6.7 mV。因此,期望的有效值分辨率为Resolution=3 uV6.7 mV=0.045% ofFullScale
传感器校准程序
校准桥式调节电路需要以下程序,且应在传感器和压电器连接到PDu150CL的情况下进行。
平衡桥梁
桥梁电阻中的小不匹配可以用桥梁平衡电池来解释。这一步优化了桥路的温度灵敏度。
1)将PDu150CL置于开环模式,并对输入端子施加0V或短路。
2)在S-和S+端子之间连接电压表(不断开桥接)。
3)调谐桥平衡电位器直到测量电压为零。
设置灵敏度和偏移
这一步校准传感器,使得施加在压电元件上的0V到150V信号会产生0V到10V的应变信号。
1)将传感器增益电位器完全逆时针旋转(10圈)。
2)确保PDu150CL处于开环模式,并对输入端子施加0V或短路。
3)监控SNS端子,调谐传感器偏移电位器直到电压为零。
4)在输入端子施加7.5V电压,使压电器两端产生150V电压。
5)监控SNS端子,调节传感器增益电位器,直到电压达到+10V。
变体
上述程序有许多变体。以下是一些有用的选项。
通过对输入端子施加5赫兹正弦波(范围为0V至7.5V)来同时调节偏移和增益,使压电器两端电压达到0V至150V。用示波器监控SNS端子,调谐传感器偏移和传感器增益电位器,直到测量的正弦波在0V到10V之间。
与其将传感器校准为全刻度的+10V,不如采用如+5V这样的其他电压。
如果压电器两端的负电压可接受,便于将整个压电电压范围(例如-30V到+150V)校准为0V到+10V的SNS电压。这需要在校准时输入-1.5V到+7.5V,而不是0V到+7.5V。
对于具有不同电压额定值的堆栈执行器,应相应选择校准输入信号。例如,压电电压额定值为-20V至+100V的合适校准输入应为-1V至+5V。
闭环作
传感器校准完成后,PDu150CL可进入闭环模式。闭环系统的结构如下图所示。

PDu150CL的反馈结构
闭环灵敏度由应变传感器的灵敏度定义。例如,如果压电器的全尺寸范围(FSR)为20微米,且应变传感器校准为0V至10V,闭环灵敏度为Sensitivity=FSR10 V=2 um/V
校准反馈增益
反馈增益定义了系统的闭环带宽和稳定时间。通常选择最低且令人满意的反馈增益,以避免不必要的传感器噪声。以下描述了一种简单的校准程序:
1)将反馈增益电位器完全逆时针转动(10圈)。
2)将PDu150CL置于闭环模式,并对输入端子施加一个带有5V偏移的1Vp-p三角波。如果传感器校准时有非10V的完整范围,则使用等于中值的偏置电压。
3)用示波器监测输入信号和SNS端子,增加反馈增益直到出现过冲。
对于不需要高速跟踪的应用,上述程序则不强制要求。最小反馈增益是合适的。
为了实现特定的-3dB带宽,将三角波替换为正弦波,并将反馈增益调谐至SNS信号振幅为0.7 Vp-p。
头部空间
当传感器的全尺度范围与压电器全尺度范围校准时,需要考虑“头距”。为了让控制环能够补偿热漂移和蠕变等效应,输入信号通常限制在10%到90%之间,这样控制环路就能在最低和最高极利用剩余的10%。例如,一个系统的完整范围为0V到10V,实际的闭环输入范围应为1V到9V。
上述方法的另一种选择是在校准时考虑剩余余量。例如,校准时不使用全刻度范围,例如-30V到+150V,而是选择更小的范围,例如-15V到+130V。采用此方法,闭环输入范围将为0V至10V,这可能比1V至9V更理想。
示例应用
在这个例子中,下面(SCL050518)所示的压电堆叠执行器是闭环运行的。执行器在150伏时产生20微米的容量,采用由两个90度圆锥组成的全桥应变传感器。
PDu150CL的校准使得施加电压0V至150V时,应变信号为0V至10V。随后选择反馈增益以实现10赫兹全频三角波的良好跟踪性能,如下所示。
10 Hz 全频跟踪性能
下图显示了对全范围1赫兹正弦波输入的开环和闭环响应。可以观察到良好的滞后补偿。

开环和闭环响应(1赫兹正弦波)
在评估总定位噪声之前,通过施加20 Hz正弦波并调整反馈增益直到幅度响应为-3dB,调整反馈增益,以提供精确为20 Hz的闭环带宽。这使得可以直接与具有相同带宽的其他方法进行比较。
通过测量功率放大器与零伏输入的差分输出电压,可以量化放大器、传感器和反馈控制器产生的总定位噪声[3]。
差分输出电压使用SR560低噪声放大器测量,增益为10,通带为0.03 Hz至1 MHz。所得电压通过压电器灵敏度(20微米/150伏)进行缩放,图示如下。有效值为8.8纳米,峰值间距为60纳米,持续50秒。这代表一个有效值分辨率Resolution=8.8 nm20 um=0.044% ofFullScale
该数值与“传感器噪声与分辨率”中的预测分辨率相符。

闭环定位噪声(0.03Hz到1MHz)
过载保护/关机
PDu150 对短路和平均电流过载进行了保护。
通过开集电极或开漏电路将使能引脚拉低电平,可以手动关闭功放。使能引脚通常浮动在5V,不应直接驱动。
散热
散热量大约为=200×(+0.010)
例如,对于正弦波输出,功率为=200×((−)+0.010)
测量散热的一种简单方法是在运行时用万用表测量供电电流。散热等于直流电流和电压的乘积。
在低噪声、低功耗的应用中,需要拆除风扇,如果散热量小于5瓦,自然对流即可。如果散热超过5瓦,建议外部气流为5 CFM。为避免干扰,外部风扇应位于距离模块80毫米以上的位置。
之前的版本
| 硬件版本 | 制造 | 手动 |
| V5 | 2017-2023 | Download Datasheet |
| V4 | 2016-2017 | Download Datasheet |
保修/支持
PDu150CL模块在运输前经过全面规格和过载保护测试。每个模块均附带一份测试报告。用户负责确保在规范内正确设置和作。没有保修期。持续超出工作规格,例如反复超过电流限制或输入电压额定值,或冷却不足,都会损坏模块,需由用户自行更换。PDu150模块不被视为可维修。如需支持,请提交联系咨询以创建支持工单。
高压安全警告
该产品产生高达180伏直流电的潜在致命电压。
遵守低压安全措施(根据ANSI C84.1-1989),例如:
- 请使用受过低压救援训练的观察员
- 不要使用裸露导线作
- 使用合适的标识
参考文献
[1] 纳米分辨率位置传感器综述:工作原理与性能;A. J. 弗莱明;传感器和执行器A:物理;2013, 190, 106-126
[2] 纳米定位系统的设计、建模与控制;A. J. 弗莱明和K. K. 梁;施普林格,2014年
[3] 纳米定位系统中的分辨率测量与预测;A. J. 弗莱明;机电一体化;2014, 24, 605-618
尺寸
安装柱可以安装M2.5螺丝。
PCB安装版本(PDu150CL-PCB)设计用于安装在主机主板上。唯一的区别是螺丝端子被安装在模块底部的接头(Harwin M20-9990645 和 M20-9990845)取代。推荐的引脚PCB孔径为1毫米。Altium的原理图和封装库可供下载。
点击这里下载3D模型