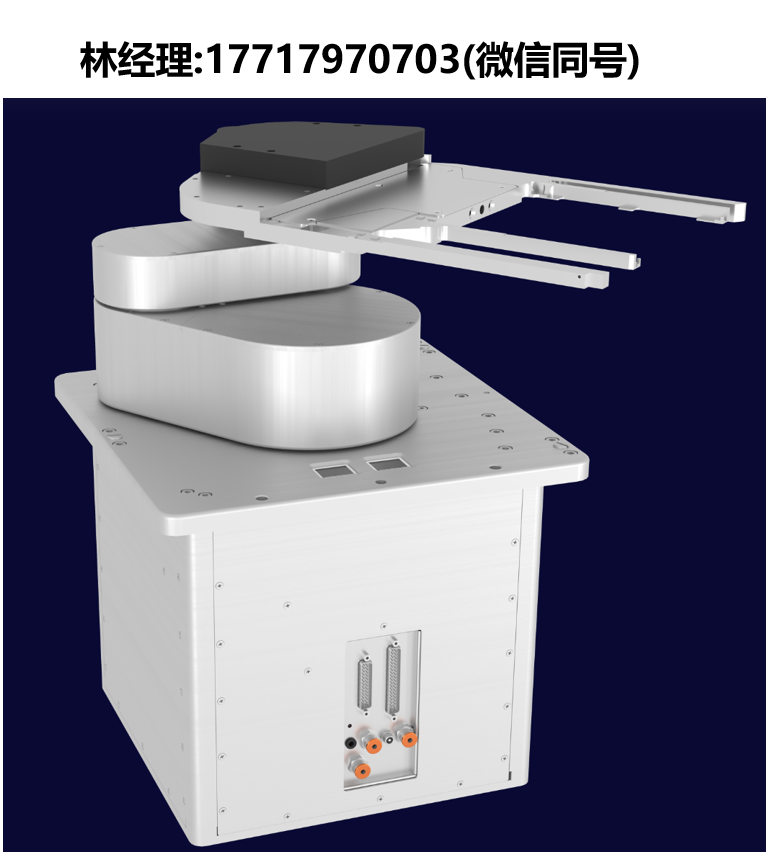
MILARA,EQUIPE GEN2,单臂晶圆处理机器人,单臂晶圆传输机械手,功能强大、重复精度高且可靠,Milara的第二代(Gen2)Equipe大气机器人(AXM 100)系列旨在为现有Equipe客户带来行业巨头的全新升级。
Equipe——晶圆处理大气机器人的世界标准。Milara的第二代(Gen2)Equipe大气机器人(AXM 100、ABM 400和ATM 400)系列功能强大、重复精度高且可靠,旨在为现有Equipe客户带来行业巨头的全新升级。
特点:
▶ 专为处理最大300毫米的晶圆和掩膜版设计
▶ 快速运动且无灵敏度损失
▶ 无背隙,提供高度可重复的定位
描述:
EQUIPE AXM 100系列第二代
功能强大、重复精度高且可靠,Milara的第二代(Gen2)Equipe大气机器人(AXM 100)系列旨在为现有Equipe客户带来行业巨头的全新升级。设计效率是这些系统卓越性能的核心。所有电机、暴露的皮带和滑轮都位于安装平面下方,最大限度地减少了颗粒污染。紧凑的尺寸使机器人能够适应更小的占地面积和更紧凑的配置。100系列得到了Milara在开发半导体行业先进自动化系统和软件方面无与伦比的专业知识的支持。
采用新一代低压交流伺服电机和23位绝对编码器,实现极端精确的控制,这些大型电机和光滑的无背隙传动系统允许在闭环直流伺服系统中快速运动且无灵敏度损失。
AXM 100的专利机械系统具有极少的运动部件,柔性内部印刷电路板的寿命预期超过1000万次循环。这些特性结合高ESD抗扰度,使每个单元的MTBF(平均无故障时间)超过75,000小时。
高度可配置,适用于所有应用
ATM机器人提供不同的径向延伸能力。标准臂链每节长度为5.25英寸,总延伸长度为10.50英寸加上末端执行器长度。适用于需要最小化占地面积和延伸长度的应用。当需要额外延伸时,可选择7.20英寸的臂链。Z轴垂直行程可为7英寸、10英寸或17英寸。可选功能包括多真空管线、晶圆盒扫描仪、CE标志和S2-93合规性。
EQUIPE AXM 400系列第二代
功能强大、重复精度高且可靠,Milara的第二代(Gen2)Equipe大气底部安装(ABM-400)和顶部安装(ATM-400)机器人旨在为现有Equipe客户带来行业巨头的全新升级。我们的ISO 3(ISO14644)/ Class 1(FED STD 209E)洁净室兼容晶圆处理机器人设计用于处理直径最大300毫米的晶圆。ATM机器人安装在顶部法兰上,而ABM的底座安装设计非常适合与我们的线性轨道一起使用。400系列得到了Milara在开发半导体行业先进自动化系统和软件方面无与伦比的专业知识的支持。
采用新一代低压交流伺服电机和23位绝对编码器,实现极端精确的控制,这些大型电机和光滑的无背隙传动系统允许在闭环直流伺服系统中快速运动且无灵敏度损失。
AXM 400的专利机械系统具有极少的运动部件,柔性内部印刷电路板的寿命预期超过1000万次循环。这些特性结合高ESD抗扰度,使每个单元的MTBF(平均无故障时间)超过40,000小时。
高度可配置,适用于所有应用
ATM和ABM机器人提供多种配置,具有不同的负载能力、Z轴垂直行程和径向延伸能力。标准臂链总延伸长度为10.50英寸加上末端执行器长度。当需要额外延伸时,可选择7.2英寸的臂链。5.20英寸臂链适用于需要最小化占地面积和延伸长度的应用。新版臂链最大限度地提高了刚度,以在更大负载下增加平面度。
GEN2智能控制
每个机器人运行ESC-200 GEN2系列智能控制器,这是一个完全可编程的晶圆处理机器人控制器。控制器使用户能够通过自定义宏命令补充标准命令库。伺服卡利用“S”曲线速度分析和高采样频率以实现更好的性能。Milara还提供与市场上大多数其他机器人硬件和软件兼容的AXM 100、ABM 400和ATM 400版本。
规格:
特点:
- 专为处理最大300毫米的晶圆和掩膜版设计
- 无背隙,提供高度可重复的定位
- 系统部件位于晶圆平面下方,最大限度地减少颗粒污染
- 快速运动且无灵敏度损失
- 高度可重复的定位
- 高ESD抗扰度
- 紧凑的占地面积
- 高度可配置
- 宏编程
- 智能命令
- 符合ISO 3(ISO 14644)/ Class 1(FED STD 209E)洁净室标准
- 符合CE和UKCA标准
- 认证:TUV(IEC/UL 61010-1)
- 符合SEMI标准——SEMI S2、S8、S22
- MTBF:AXM 100系列 > 75,000小时 / AXM 400系列 > 40,000小时
AXM 100系列通用规格:
- 型号:ATM 100
- 负载能力:0.45公斤 [1磅]
- 基板传感器:真空,可选激光晶圆盒映射
- 重量:12.7公斤 [28磅]
- 所需设施:真空18-24英寸汞柱
- 电源要求:100 – 240 VAC,50/60 Hz
- 吞吐量:< 4秒/晶圆/拾取和放置(传输)
AXM 100系列轴规格:
- 运动范围
- 径向轴:2 x (133.35毫米 [5.25英寸] 或 182.88毫米 [7.20英寸])
- 旋转轴(Theta):335°
- Z轴:177.8毫米 [7英寸]
- 重复精度(典型)
- 径向轴:± 0.0508毫米 [0.002英寸] @3 σ
- 旋转轴(Theta):± 0.02° @3 σ
- Z轴:± 0.0508毫米 [0.002英寸] @3 σ
- 速度(典型)
- 径向轴:60.96厘米/秒 [24英寸/秒]
- 旋转轴(Theta):360°/秒
- Z轴:25.4厘米/秒 [10英寸/秒]
AXM 100系列安装规格:
- 机器人安装孔直径:215.9毫米 [8.500英寸]
- 机器人螺栓模式:3 x 1/4-20通孔,直径228.6毫米 [12.350英寸]
- 末端执行器:4 x 4-40,直径35.306毫米 [1.390英寸]
- 死区:25°
AXM 400系列通用规格:
- 型号:ATM 405/407 -> 负载能力:0.45公斤 [1磅]
- 型号:ATM 407B -> 负载能力:0.68公斤 [1.5磅]
- 型号:ATM 407C -> 负载能力:1.81公斤 [4磅]
- 基板传感器:真空
- 重量:27.21公斤 [60磅]
- 所需设施:真空18-24英寸汞柱
- 电源要求:100 – 240 VAC,50/60 Hz
- 吞吐量:< 4秒/晶圆/拾取和放置(传输)
AXM 400系列轴规格:
- 运动范围
- 径向轴:2 x (133.35毫米 [5.25英寸] 或 182.88毫米 [7.20英寸])
- 旋转轴(Theta):335°
- Z轴:330.2毫米 [13英寸]
- 重复精度(典型)
- 径向轴:± 0.0508毫米 [0.002英寸] @3 σ
- 旋转轴(Theta):± 0.02° @3 σ
- Z轴:± 0.0508毫米 [0.002英寸] @3 σ
- 速度(典型)
- 径向轴:60.96厘米/秒 [24英寸/秒]
- 旋转轴(Theta):360°/秒
- Z轴:25.4厘米/秒 [10英寸/秒]
AXM 400系列安装规格:
- 机器人安装孔直径:292.1毫米 [11.500英寸]
- 机器人螺栓模式:3 x 6.35毫米 [0.25英寸] 通孔,直径313.69毫米 [12.350英寸]
- 末端执行器:
- 4 x 4-40,直径35.306毫米 [1.390英寸](405、407)
- 4 x 6-32,直径50.8毫米 [2.000英寸](407B、407C)
- 死区:25°

https://www.bihec.com/milarasmt/MILARA,EQUIPE GEN2,单臂晶圆处理机器人,单臂晶圆传输机械手/
https://zhuanlan.zhihu.com/p/29238639060