Logosol diamond H3晶圆机器人、Logosol晶圆处理平台
Logosol晶圆处理平台包含源自30多年半导体自动化经验的各种产品和服务。技术范围从硬件、软件和机械设计到制造、集成和应用工程。该公司与晶圆搬运机器人和预对准器相关的设计解决了需要直接更换半导体晶圆厂遗留产品的应用,以及OEM制造商新开发的资本设备中的自动化材料搬运。这些产品线采用Logosol完全拥有和控制的技术,包括运动控制电子设备、晶圆处理固件、软件工具、实用工具和机械设计。整个技术范围的可用性允许极高水平的无缝集成、可制造性、可靠性和成本效益。
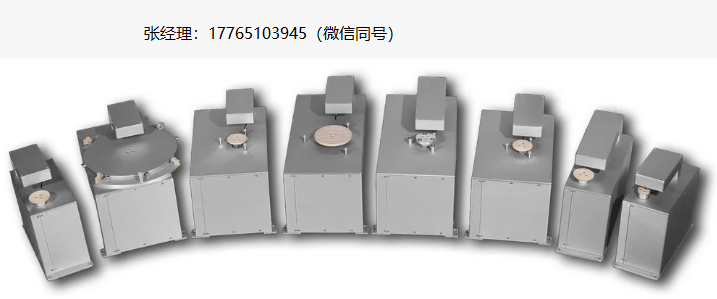
Logosol拥有向各种实体授权其晶圆处理自动化专有技术的悠久历史。作为灵活的模块化自动化平台的一部分,这些产品包括各种机器人尺寸和手臂配置。被许可方受益于公司在半导体自动化领域的丰富专业知识、成熟的产品和解决方案,以及在该领域30多年的专业经验。我们公司提供全面且高度可定制的统一技术,涵盖您项目的方方面面,从机械设计到运动控制电子设备、固件、软件工具和实用程序。无论您需要简单还是复杂的解决方案,我们都可以定制我们的技术来满足您的特定要求。你将完全控制你的项目,而不依赖于第三方的补充。我们的技术设计灵活、可扩展、可靠,确保高性能和高质量标准。该公司不仅提供制造许可证和文件,还提供机器人控制器、电源和制造整个产品所需的特定电子模块。此外,Logosol提供最全面的晶圆预对准器,可与所有许可的晶圆搬运机器人无缝集成。
LRC-x31g3是三轴、四轴和五轴机器人控制器,带有集成CPU板和功率放大器,专为需要精确控制旋转或线性无刷电机的应用而设计。它们可以用作内置或外部控制器。LRC-x31g3通过主机RS-232或10/100 Base-T以太网接口进行控制。使用Logosol分布式控制网络扩展接口可以无缝连接额外的外部设备。LRC-x31g3配备了各种安全功能,如输出和电机短路保护、欠压关闭和编码器存在控制、智能停止功能,以避免机器在外部停止或电源断开时机械臂掉落。先进的运动控制技术支持非常高分辨率的编码器,能够产生出色的多轴轨迹。硬件辅助的位置锁存提高了动态晶圆对准的精度。
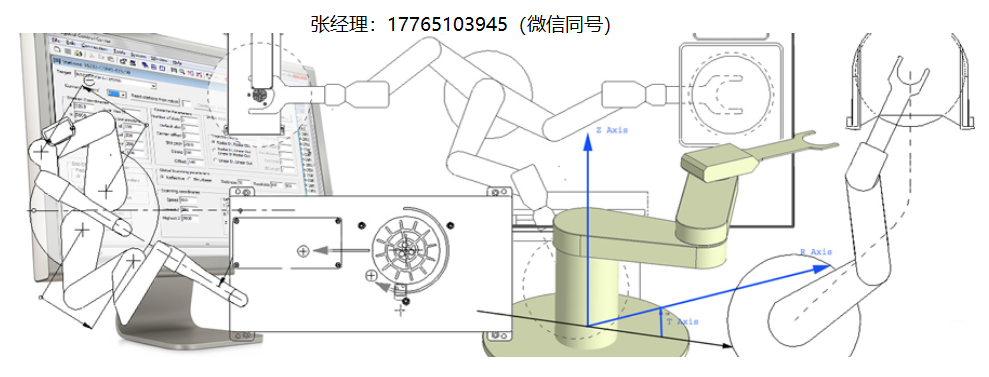
MCL5是Logosol的第五代专有运动控制软件包,提供特定领域编程语言和多任务实时解释器。这是一个致力于机器人控制应用程序设计的编程框架。MCL5可执行程序包括运动控制器和I/O模块的集成、各种机器人运动学的实现、对复杂轨迹运动的支持以及对系统完整性的监控。该可执行文件还包括一个实时多任务脚本解释器。它允许设计应用特定的脚本,可用于协调机器人运动的序列,并实现自定义主机通信协议。脚本语言由一组保留字定义,其表达式语法类似于C编程语言。
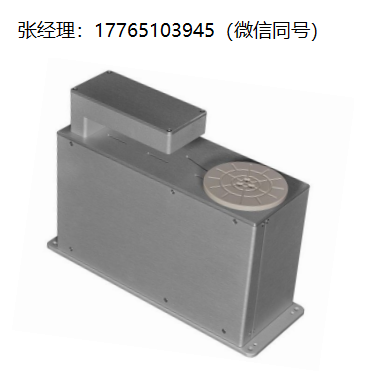
Diamond H3系列大气机器人代表了一个重要的晶圆处理设备的设计和可靠性方面的工程进步。
得益于技术先进的组件,机器人利用超低惯性、高响应的无刷伺服电机,结合零间隙Harmonic Drive®齿轮,大大提高了灵活性和精度。
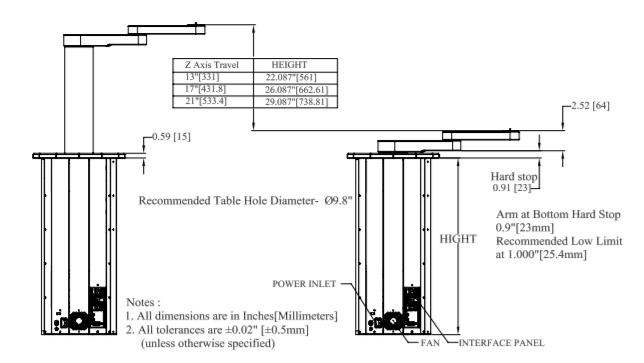
创新的一体化1级洁净室兼容设计将运动控制器、伺服放大器和电源整合到机器人的行业标准占地面积内。
高强度结构件可实现顶部、底部或侧面安装配置,而不会影响系统刚度。32位实时内核可沿平滑连续轨迹提供精确的运动分析,而分布式控制架构允许与线性轨迹、预对准器和其他子组件无缝集成。