美国,logosol,LRC-x31g3,LRC-x31g2,MCL5,WHP,H1,H3,H4,H5,E5,晶圆处理平台
晶圆处理平台
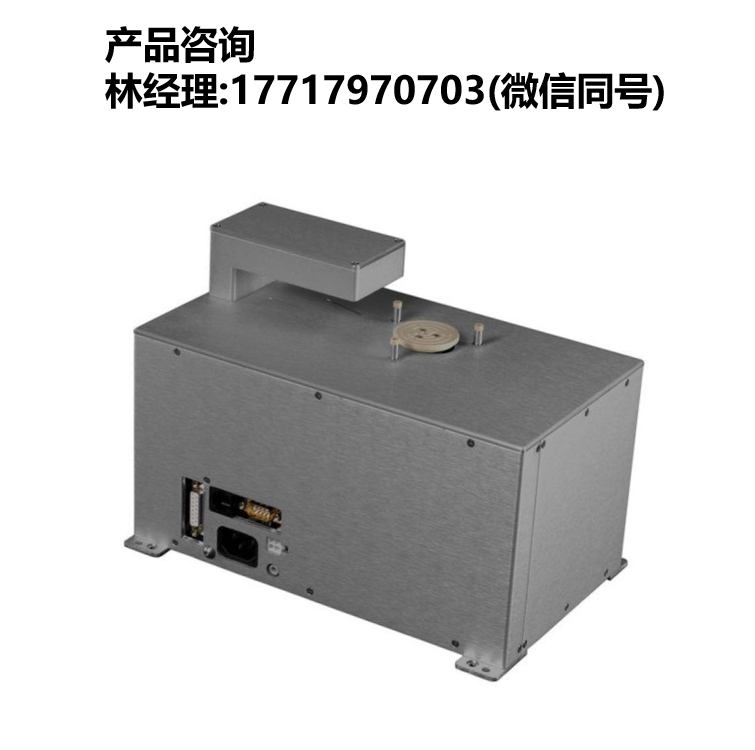
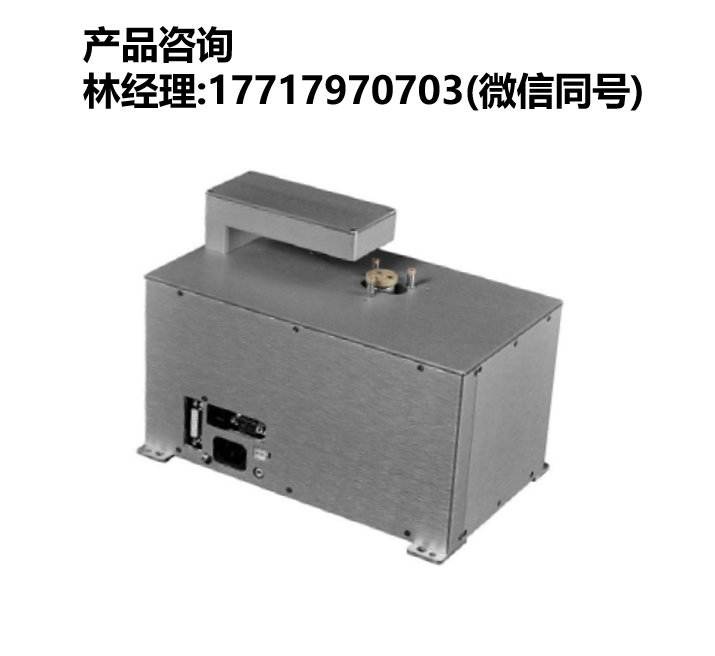
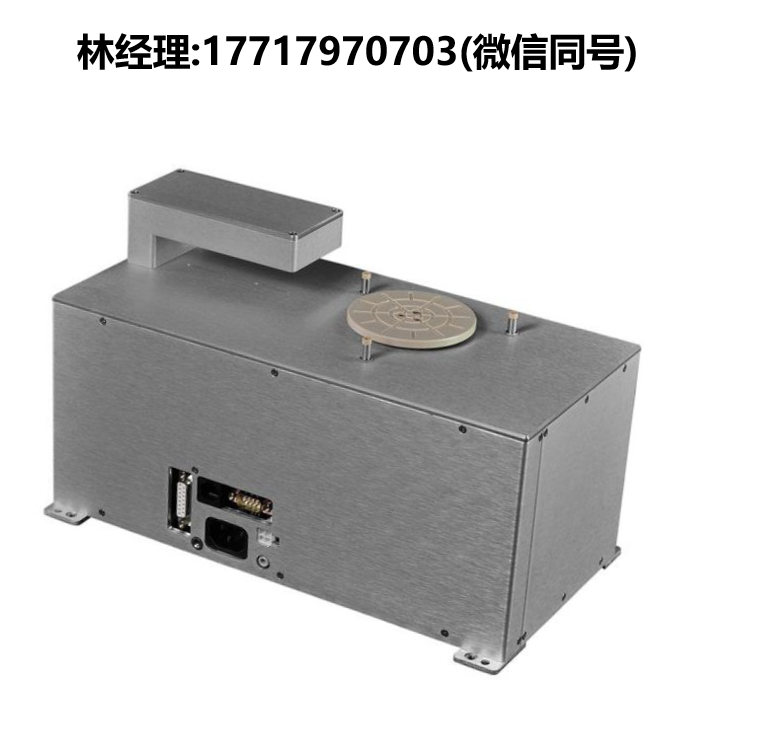
Logosol 晶圆处理平台涵盖了多种产品和服务,源自超过 30 年的半导体自动化经验。其技术包括硬件、软件、机械设计、制造、集成和应用工程。公司设计的晶圆处理机器人和预对准器,旨在满足需要在半导体制造厂内替换旧产品的应用需求,并支持OEM制造商的新开发资本设备中的自动化物料处理。这些产品线使用完全由 Logosol 拥有和控制的技术,包括运动控制电子、晶圆处理固件、软件工具、公用设施和机械设计。拥有整个技术光谱的可用性,确保了高度的无缝集成、可制造性、可靠性和成本效益。
机器人许可
Logosol 在晶圆处理自动化领域具有悠久的历史,将其专有技术许可给多个实体。产品包括多种机器人尺寸和臂型配置,作为灵活的模块化自动化平台的一部分。被许可方可以受益于公司在半导体自动化领域的广泛经验、经过验证的产品和解决方案,以及超过30年的领域经验。我们公司提供一套全面且高度可定制的统一技术,涵盖项目的每个方面,从机械设计到运动控制电子、固件、软件工具和公用设施。无论您需要简单还是复杂的解决方案,我们都可以根据您的特定需求定制技术。您将完全掌控您的项目,而无需依赖第三方添加。我们的技术设计灵活、可扩展且可靠,确保高性能和质量标准。公司不仅提供制造许可证和文档,还提供构建整个产品所需的机器人控制器、电源和特定电子模块。此外,Logosol 还提供最全面的晶圆预对准器,与所有已授权的晶圆处理机器人完美集成。
机器人控制器
LRC-x31g3 是三轴、四轴和五轴机器人控制器,配有集成的 CPU 板和功率放大器,设计用于精确控制旋转或线性无刷电机的应用。它们可以用作内置或外部控制器。LRC-x31g3 通过主机的 RS-232 或 10/100 Base-T 以太网接口进行控制。可以通过 Logosol 分布式控制网络扩展接口无缝连接额外的外部设备。LRC-x31g3 配备了多种安全功能,如输出和电机短路保护、欠压停机和编码器存在控制、智能停止功能,以避免机器外部停止或断电时机器人臂掉落。支持非常高分辨率编码器的先进运动控制技术可实现卓越的多轴轨迹生成。硬件辅助位置锁存技术提高了飞行中晶圆对准的精度。
运动控制框架
MCL5 是 Logosol 第五代专有运动控制软件包,提供领域特定的编程语言和多任务实时解释器。这是一个专门用于机器人控制应用设计的编程框架。MCL5 可执行文件集成了运动控制器和 I/O 模块,实现了各种机器人运动学,支持复杂的轨迹运动,并监控系统完整性。该可执行文件还包括一个实时多任务脚本解释器,允许设计应用特定的脚本,这些脚本可以用于协调机器人运动的顺序并实现自定义的主机通信协议。该脚本语言由一组保留字定义,表达式语法类似于 C 编程语言。
美国,logosol 晶圆处理平台演示视频:
产品资料:
isel Germany iselRobotik 晶圆处理机器人
由 Logosol 共同设计和提供动力
Milara Diamond 晶圆处理机器人
由 Logosol 授权并提供动力
美国,logosol,LRC-x31g3,LRC-x31g2,MCL5,WHP,H1,H3,H4,H5,E5,晶圆处理平台
https://www.bihec.com/logosol/LRC-x31g3,LRC-x31g2,MCL5,WHP,H1,H3,H4,H5,E5/