LOGOSOL预对准器工作原理及适用过程
Logosol, Inc. 是一家精密运动自动化设计公司,开发和制造最先进的运动控制组件和系统用于工业自动化。Logosol 专注于设计和开发具有高度集成、卓越可靠性和性能、软件复杂性和无与伦比的多功能性的完整解决方案。
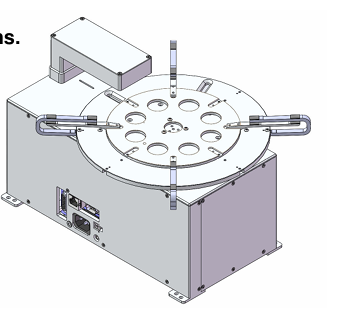
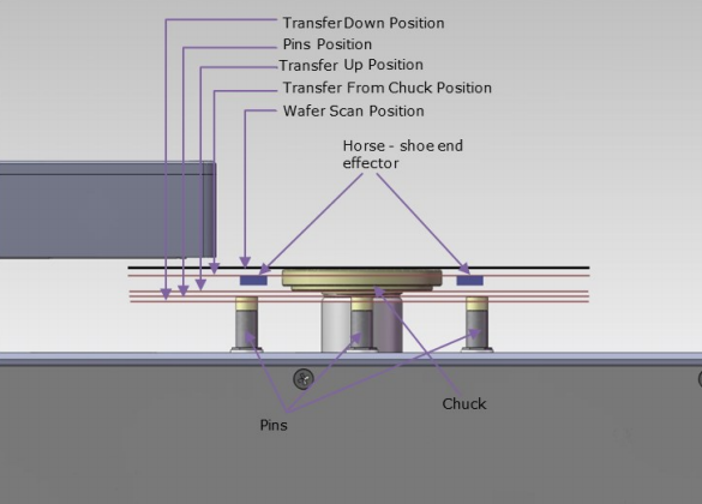
LOGOSOL预对准器主要部件:
Chuck(卡盘): 用于吸附和固定晶圆。
Horse-shoe end effector(马蹄形末端执行器): 机械手的手臂末端,负责从上一个位置取放晶圆到预对准器上。其马蹄形状是为了避开晶圆边缘的传感器。
Pins(销针): 一组可以升降的针,用于在交接过程中托起或降低晶圆。
各个位置: 如 Wafer Scan Position(晶圆扫描位置)、Transfer From Chuck Position(从卡盘传输位置)、Transfer UP position(传输顶部位置)、Pins Position(销针位置)、Transfer down position(传输底部位置),代表了晶圆在不同步骤中所处的精确位置。
LOGOSOL预对准器上料与交接:
机械手使用马蹄形末端执行器,将一个未对准的晶圆运送到预对准器上方。 此时,销针会上升到 Transfer Up Position,从末端执行器上接过晶圆。
然后末端执行器退出,销针带着晶圆下降到 Wafer Scan Position 或类似高度 中心定位与缺口寻找: 在晶圆扫描位置,卡盘开始带动晶圆高速旋转。 同时,在晶圆边缘附近会有一个或多个光学传感器。当晶圆旋转时,传感器通过检测边缘的通过/遮挡变化,可以绘制出晶圆的轮廓。
系统通过分析这个轮廓数据,就能计算出晶圆的实际中心(与卡盘的旋转中心偏差多少)和缺口/平边的位置。
LOGOSOL预对准器对准执行:
计算完成后,卡盘停止旋转,并将缺口旋转到预设的零度角方向。 为了补偿中心偏差,卡盘本身是一个可以在X、Y方向微动的平台。它会根据计算出的中心偏差值,进行微小的移动,将晶圆的几何中心移动到吸盘的旋转中心上。
LOGOSOL预对准器下料与传出:
对准完成后,销针 再次上升,到 Transfer Up Position,将已经对准的晶圆从吸盘上举起。 机械手的马蹄形末端执行器 再次伸入,到达 Transfer From Chuck Position,从销针上接过晶圆。 销针 下降,末端执行器带着已经中心对正、方向统一的晶圆离开,送往下一个加工模块。
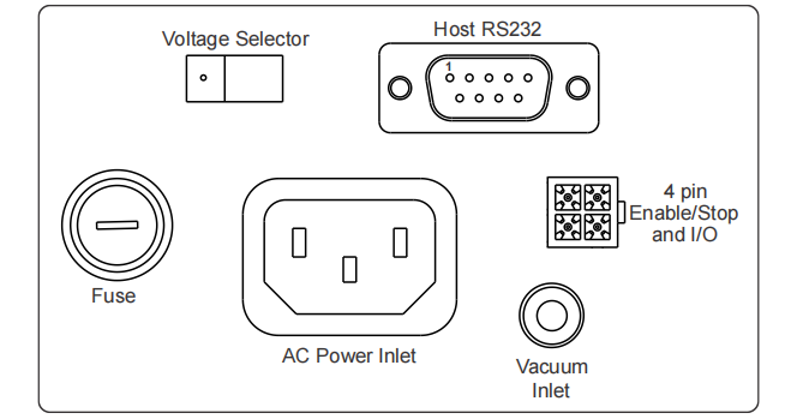
LOGOSOL预对准器通讯:
将串行终端连接至预对准器的主机接口,配备LCC——Logosol控制中心软件。可实现通讯,LPA的操作说明书有对操作指令做详细介绍 。