
ELECTRIC SHAFT SYSTEM-电动轴系统
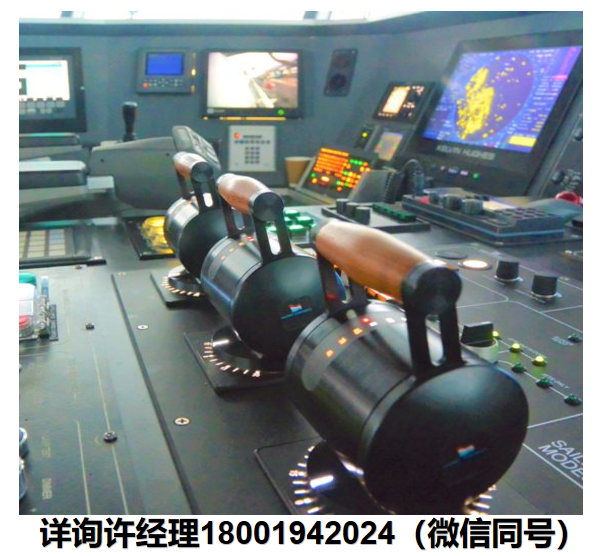
Kwant控制杆主要用于船舶推进装置的电子遥控,通常由发动机/螺旋桨/变速箱/离合器子组件组合而成。遥控是从驾驶台(WH前部、WH后部、左舷侧或Stbd侧)进行的。为了实现这一点,杠杆配备了信号传输发动机转速,离合器方向等。连接到推进装置控制系统。
电报系统
如果遥控(RC)系统出现故障,可以切换到电报模式。现在,相同的操纵杆用于从驾驶室向发动机控制室(ECR)或发动机室(ER)发送电报命令,无论哪一个被选作当前应答位置。警报将会响起,直到命令被确认。推进装置现在由ECR或ER操纵杆远程控制,或者在ER操纵杆没有远程控制发射器的情况下由手动控制。

电气轴系统
电气轴系统的目的是同步所有连接的控制单元的操纵杆,主要是在主驾驶台和驾驶台侧翼。它提高了易用性,增加了紧急情况下的安全性,因为可以从任何连接的操作位置直接进行控制。同步能够在不改变推进和/或航向控制信号的情况下切换操作位置(无碰撞接管)。第二个优点是,提供这些信号的发送器只需要在一个控制单元上,因为所有的杠杆将同时移动。为了实现同步,控制单元配备了伺服电机。电子电路将负责驱动这些电机,以及处理接管请求。可通过发光按钮或其他系统的潜在自由触点实现接管。
电动轴系统规格参数:
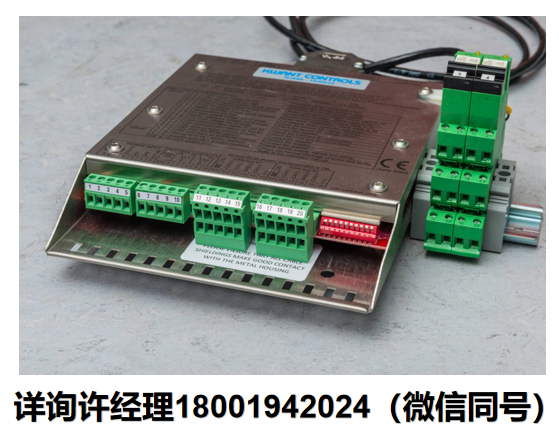
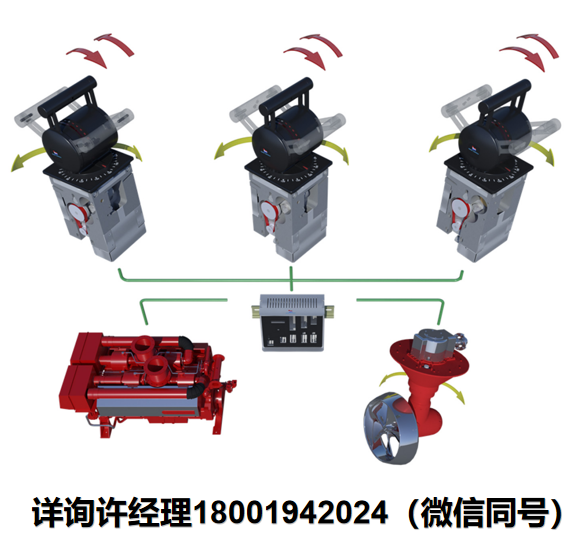
这款最新一代的电动轴系统基于步进电机驱动杠杆和CAN总线技术。它将传统上分离的电报和电气轴系统合并为一个组合系统,从而大大提高了灵活性,减少了安装时间和布线成本。步进电机的应用引入了许多功能,如可编程棘爪、触觉反馈和非常精确的微调,这些都是传统DC电机技术无法实现的。CAN总线是一种广泛分布且坚固耐用的串行总线系统,它植根于汽车工业,在汽车工业中必须满足极其苛刻的要求。电子设备已经完全分布在操作位置上,从而取消了传统的中央机柜。
将控制单元连接到CAN总线的电子模块被称为CUBI,简称C控制Unit toB我们I界面。与模块通信的基础是CAN-open协议。CUBI模块包含一个印刷电路板,可以处理两个伺服电机控制器和八个数字输入和输出,同时提供两个can总线收发器用于总线冗余。根据EN-50022A,CUBI模块有一个防海水不锈钢外壳,可以很容易地在35/7.5毫米DIN导轨上点击。聚氨酯涂层保护印刷电路板的敏感部分。
为了连接到船上的电缆,使用可插拔连接器。这简化了模块的安装和更换。带有D-Sub连接器的电缆用于模块的杠杆侧。
每个Elas-5系统最多可以处理八个控制单元(节点),最多可以将四个这样的系统连接在一起,从而允许最多32个控制单元完全同步运行。
Elas-5系统已通过以下主要分类局的型式认证:ABS、BV、CCS、DNV、GL、LRS、NKK、RINA和RMRS。
电动轴系统选项:
- Central take over中央接管
在标准系统中,主操纵杆的选择是通过一个简单的发光按钮完成的,该按钮直接连接到相应的CUBI模块(=本地接管)。如果位置接管必须通过另一个控制系统来实现,按钮可以用潜在自由触点(每个位置一个)来代替,这些触点都可以连接到单个CUBI模块。 - Tandem mode.串联模式
也称为“一杆模式”,该选项允许操作员仅用一个杆控制多达四个推进装置,以提高操作舒适性。为了实现这一点,端口侧和Stbd侧系统的CAN总线通过一个隔离的CAN中继器连接在一起。 - Electrical fine adjustment电气微调
对于像护航航行这样需要非常精确地设置引擎速度或螺旋桨螺距的活动,手动操作杆通常太过自然。为了克服这一问题,该系统可以扩展为带有电子微调按钮,该按钮可以非常缓慢地将控制杆向所需方向移动。CUBI模块现在使用改进的微步进来实现最佳精度。 - Haptic feedback触觉反馈
为了限制控制杆的允许操作范围,可以激活所谓的“触觉反馈”来防止控制杆移动到该区域之外。伺服电机将试图推回杠杆,导致杠杆振动,让操作员知道他正在离开安全操作区域。
- Sub-telegraph commands子电报命令
最多可连接三个发光按钮来传输和确认所谓的子电报命令,如“袖手旁观”、“发动机结束”和“海上”。子电报命令总是从驾驶台发送到控制室或急诊室。间歇性声音警报(1 Hz)用于区别于推进电报警报。
- Programmable detents.可编程棘爪
当控制单元处于从模式时,用于移动控制杆的伺服电机也可用于在控制单元处于主模式时产生机械制动(可触知的停止)的感觉。默认情况下,空档位置有一个卡位,其他位置可以编程,例如离合位置或最佳发动机转速。另一个例子:当在电报模式下,所有的命令在每个命令栏的中间都有一个定位点。每个电机最多可编程16个棘爪。 - External signals.外部信号
外部0-20mA信号的两个输入可用,例如来自操纵杆或速度导向系统。这允许自动控制杆与外部信号源对齐,并提供从控制杆到外部控制的无扰动切换,反之亦然。